
Assistentiesystemen voor in de stad: gevaren zien en herkennen op dezelfde manier als een mens dat doet
{kind=link}
{kind=link}
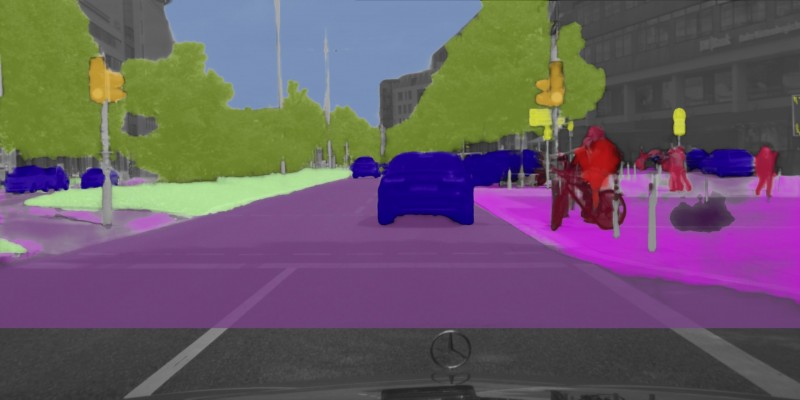
Kruisend verkeer, fietsers, overstekende voetgangers die misschien wel intensief met hun smartphones bezig zijn, moeders met kinderwagens, spelende kinderen – het verkeer in de stad stelt hoge eisen aan de automobilist in uiteenlopende situaties, met een verhoogd risico op ongevallen. Dat biedt veel ruimte voor assistentiesystemen die de bestuurder ondersteunen en het rijden in de stad veiliger en minder stressvol maken. Onderweg naar dat doel hebben onderzoekers van Daimler een doorbraak bereikt in samenwerking met het UR:BAN researchproject. Gebruikmakend van het zogeheten ‘scene-labelling’ classificeert het systeem automatisch met behulp van camera’s volledig onbekende situaties en detecteert alle voor bestuurdersassistentie belangrijke objecten – van fietsers tot voetgangers en rolstoelgebruikers.
Onderzoekers van de afdeling Environment Sensing lieten hun systeem duizenden foto’s zien van allerlei Duitse steden. Op de foto’s waren met de hand heel precies 25 verschillende objectklassen gelabeld, zoals voertuigen, fietsers, voetgangers, straten, verschillende soorten wegdek, gebouwen, allerlei aanduidingen en bomen. Op basis van deze voorbeelden leerde het systeem volledig onbekende beelden automatisch correct te classificeren en op die manier alle voor bestuurdersassistentie belangrijke objecten te detecteren, ook al waren deze sterk verborgen of ver weg. Dit werd mogelijk door krachtige computers, zogeheten ‘Deep Neural Networks’, die kunstmatig hetzelfde zenuwstelsel hebben als het menselijk brein.
Daarmee functioneert het systeem op een wijze die vergelijkbaar is met het zicht van een mens. Ook dat is gebaseerd op het zeer complexe neuraal systeem, dat de informatie van de individuele ‘sensoren’ van het menselijk lichaam zo lang aan het netvlies linkt tot de mens in staat is een bijna ongelimiteerd aantal objecten te herkennen en te onderscheiden. ‘Scene-labelling’ transformeert de camera van een louter metend systeem naar een interpreterend systeem, net zo multifunctioneel als de interactie tussen oog en brein. Professor Ralf Guido Herrtwich, Head of Driver Assistance and Chassis Systems, Group Research and Advance Development bij Daimler AG: "De enorme toename van computervermogen in de afgelopen jaren brengt de dag dichterbij dat voertuigen in staat zullen zijn hun omgeving waar te nemen op dezelfde wijze als mensen dat doen en ook op een correcte manier complexe situaties in stadsverkeer in te schatten.” Om dit systeem snel tot ontwikkeling te brengen, gaat Daimler samen met partners actief door met het onderzoek om uiteindelijk het doel van rijden zonder ongevallen waar te maken.
Toekomstige functies van assistentiesystemen al gedemonstreerd in testauto’s
Op de slotbijeenkomst van het gezamenlijke researchproject UR:BAN, afkorting voor ‘Urban Space: User-friendly Assistance Systems and Network Management’, presenteerden de onderzoekers van Daimler overtuigende resultaten van in totaal vijf testvoertuigen. Behalve een real-time demonstratie van scene-labelling liet een ander testvoertuig radarsystemen zien en nieuwe, fascinerende mogelijkheden die die systemen in een stedelijke omgeving bieden. Duidelijk werd dat radarsensoren nu in staat zijn niet alleen een bewegend object uitgebreid in kaart en in beeld te brengen, maar ook elk stilstaand object.
Door de bijzondere eigenschappen van radargolven kan het systeem ook functioneren in mist en andere slechte weersomstandigheden. Bovendien maakt de zogeheten ‘micro-doppler’ het mogelijk om bewegingen en/of contouren van bewegende voetgangers en fietsers ondubbelzinnig te herkennen en te classificeren. Verder werd gedemonstreerd hoe de gegevens van radar- en camerasensoren door samenwerkende sensoren uitgewerkt worden tot een model van hoe de omgeving eruitziet. Dat model houdt niet alleen rekening met locatie en snelheid van uiteenlopende weggebruikers, maar ook met zaken als type en grootte van de objecten. Het omgevingsmodel houdt ook rekening met onvolledige sensorgegevens evenals met te weinig informatie, precies zoals dat het geval is in het dagelijks verkeer.
Het derde testvoertuig had een systeem aan boord voor de detectie, classificatie en identificatie van de intentie van voetgangers en fietsers. Net als een menselijke bestuurder analyseert dit systeem aan de hand van de positie van hoofd en lichaam en de positie ten opzichte van de rand van de weg of de voetganger van plan is op de stoep te blijven of de straat over te steken. In gevaarlijke situaties zorgt dit ervoor dat een ongevalspreventiesysteem tot 1 seconde eerder geactiveerd kan worden dan bij de huidige systemen.
Een ander hoogtepunt van de demonstratie vormde de manier waarop op radar en camera gebaseerde systemen het wisselen van rijbaan in stadsverkeer veiliger en comfortabeler kunnen maken. Dit assistentiesysteem volgt een opdracht van de bestuurder en maakt het mogelijk te ondersteunen bij het wisselen van rijbaan bij snelheden tussen 30 en 60 km/h.
Het systeem houdt zowel de omgeving als het verkeer op de rijbanen in de gaten. Met behulp van situatieanalyse wordt voorspeld hoe het scenario zich zal ontwikkelen en wordt vervolgens het door de computer berekende traject gevolgd. Daarna volgt de ondersteunende langs- en dwarsgeleiding voor het wisselen van rijbaan. De bestuurder kan intuïtief op het combi-instrument zien of hij het wisselen van rijbaan wel of niet aan het systeem over kan laten. Nadat de actie met succes afgerond is, wordt de controle over de lengterichting van de auto met behulp van de spoorassistent hervat. De bestuurder heeft te allen tijde de keuze de regie van het systeem over te nemen door zelf te sturen, gas te geven of te remmen.
Het vijfde testvoertuig liet alle mogelijkheden zien om het gedrag van de bestuurder te voorspellen met betrekking tot voorgenomen wisseling van rijbaan of richtingverandering. Bij een voorgenomen rijbaanwisseling bijvoorbeeld worden blikken over de schouder gelinkt aan de rijparameters die al vastgesteld zijn. Een waarschijnlijke richtingverandering kan worden voorspeld uit de interactie tussen stuurbeweging, snelheidsafname en navigatiegegevens. Tijdens de demonstratie werd de richtingaanwijzer automatisch ingeschakeld om andere weggebruikers zo vroeg mogelijk te waarschuwen.